

모든 제품
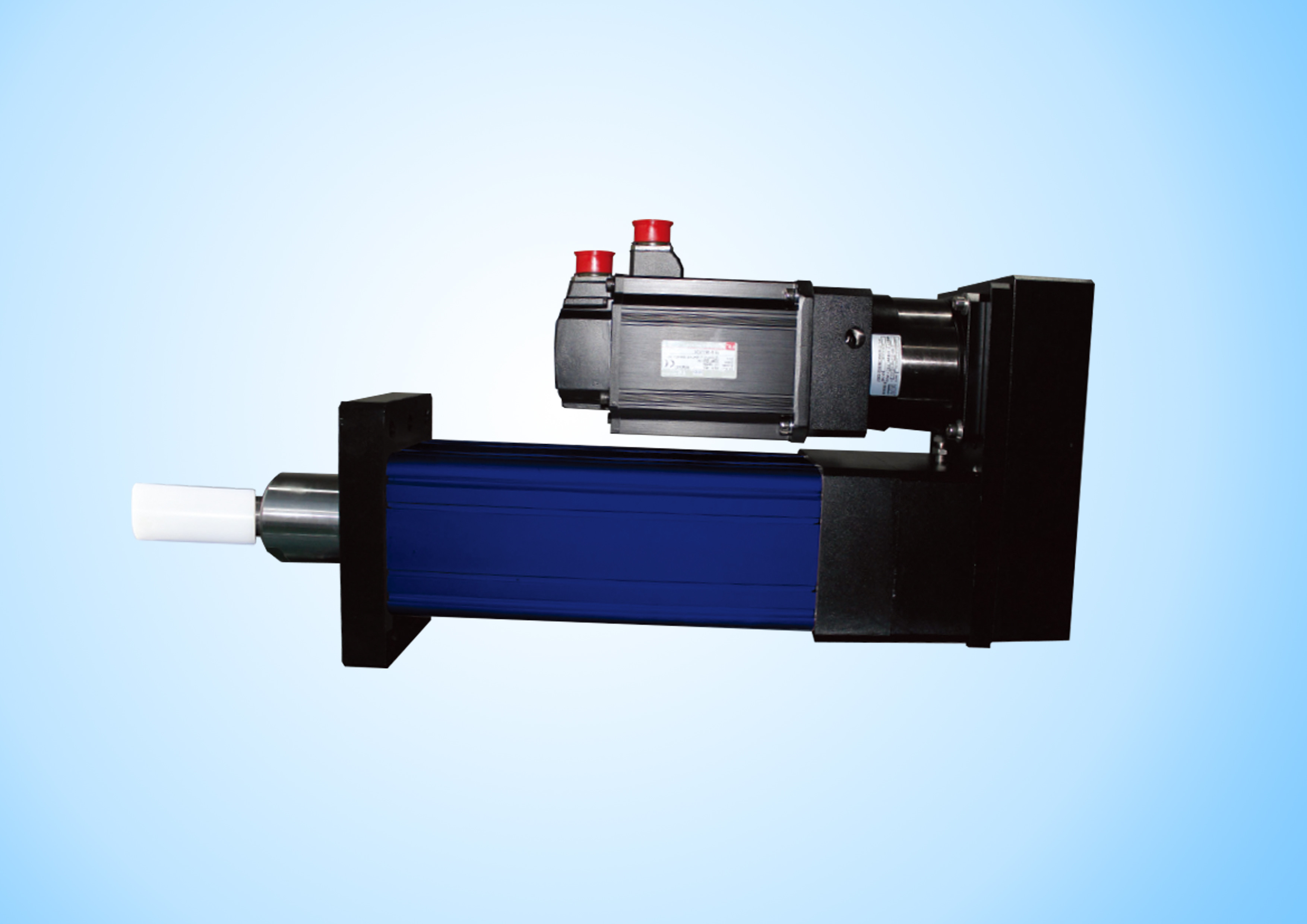
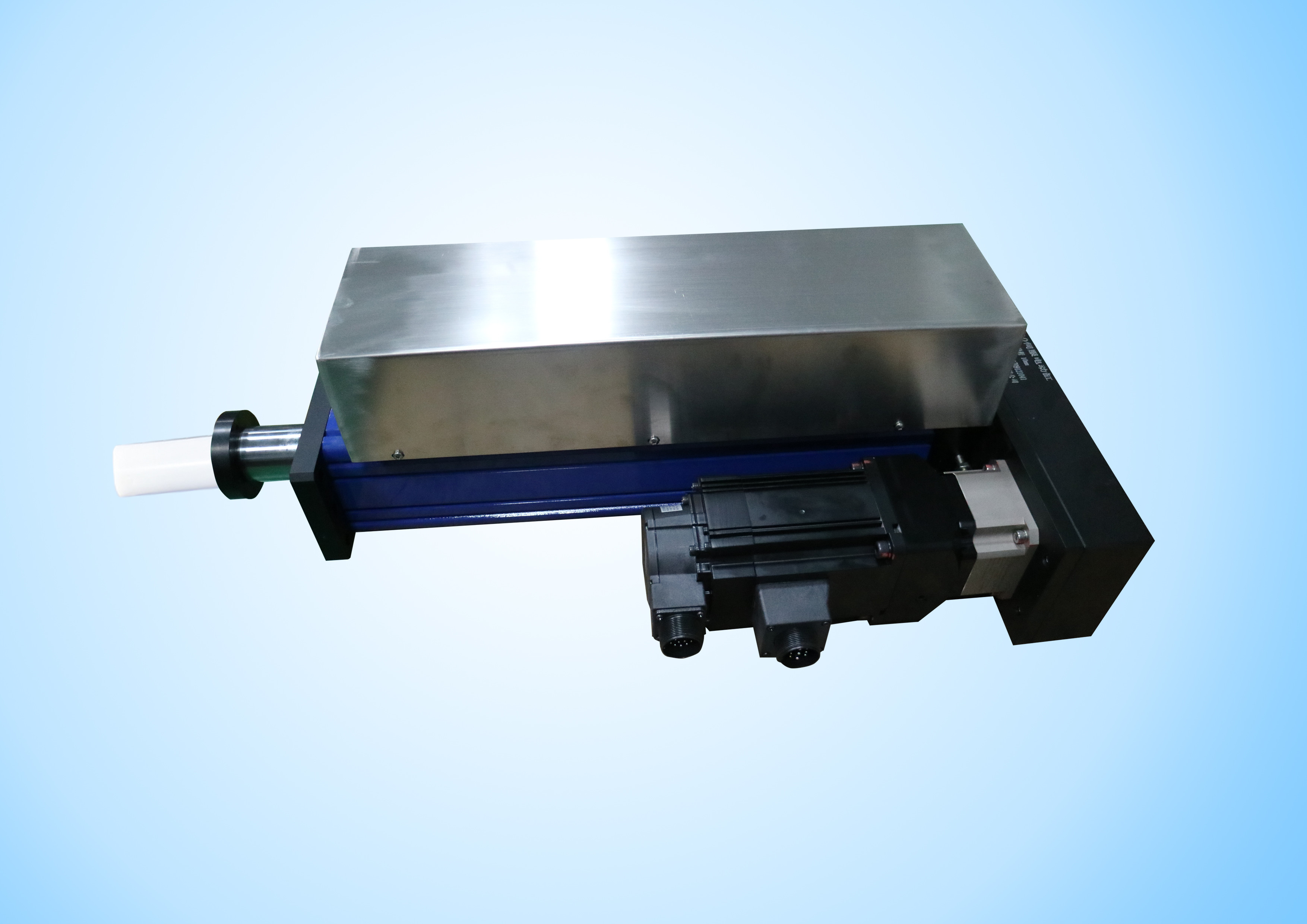
0.45KN-350KN 산출 힘을 가진 220V 고속 알루미늄 선형 전기 실린더




| 원래 장소 | 중국 |
|---|---|
| 브랜드 이름 | TJ |
| 인증 | ISO9001:2008,CE |
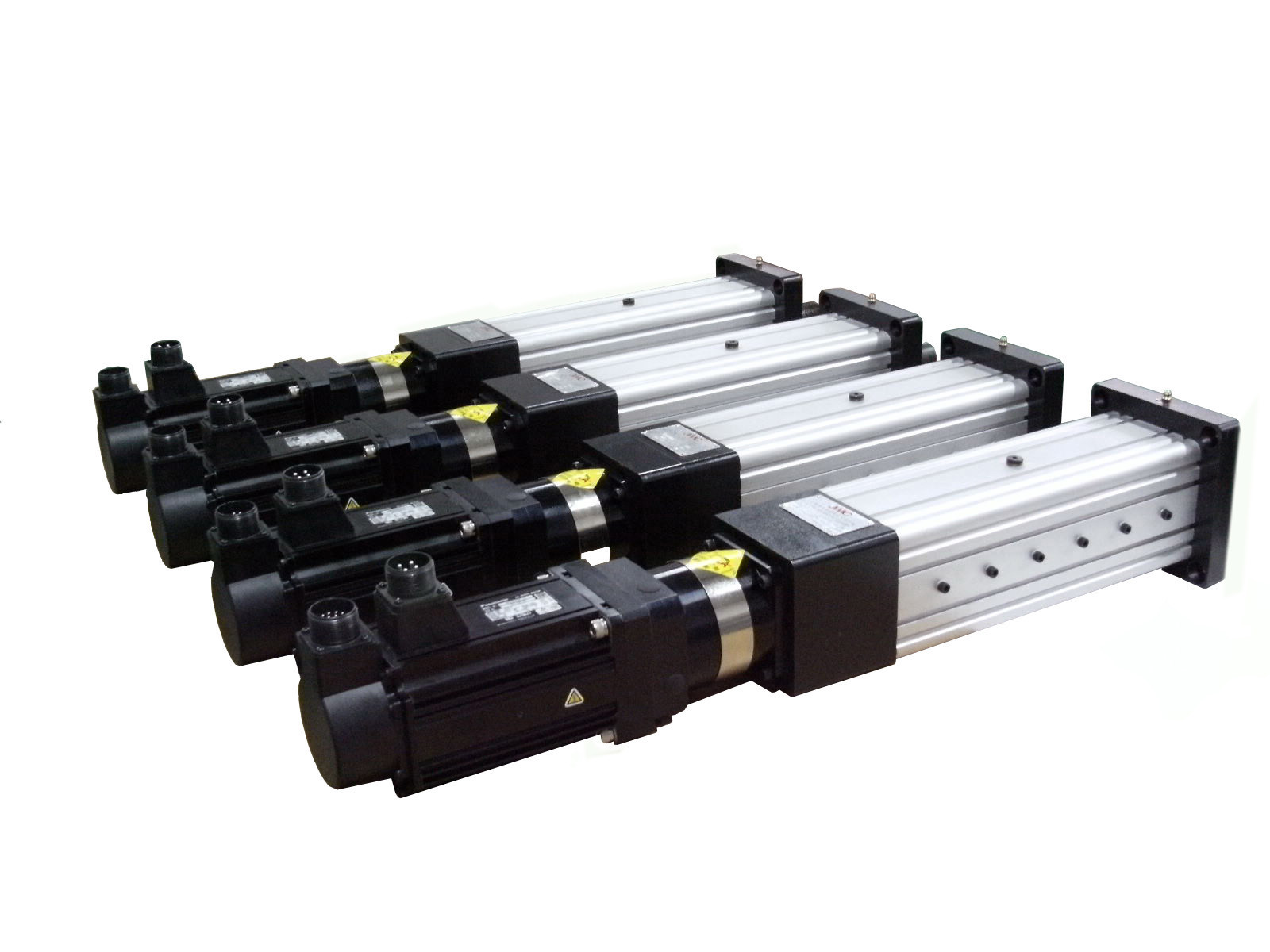
| 모델 번호 | TJE040, THE065, THE075, THE095, THE110, THE135, TJER160, TJER190, TJER220, TJER250 |
| 최소 주문 수량 | 1 PC |
| 가격 | negotiable |
| 포장 세부 사항 | 외부 패킹: 판지 또는 비 나무 상자; 방석 패킹: EPE 거품 |
| 배달 시간 | 3~4 주 |
| 지불 조건 | T/T의 미리 30% 지불, 납품의 앞에 70% |
| 공급 능력 | 달 당 800 pc |
제품 상세 정보
| 재료 | 알루미늄 단면도 | 속도 | ≤150mm/s |
|---|---|---|---|
| 로드 | 10kg~30t | 타격 | ≤2m |
| 반복성 | ±0.01mm | 출력 힘 | 0.45KN~350KN |
| 모터 연결 유형 | 선형/병렬 | 내부 회전 방지 | /바깥쪽으로 |
| 강조하다 | 방수 선형 액추에이터,실린더 작동 선형,350KN 선형 전기 실린더 |
||
제품 설명
1. 조작상 원리
전기 실린더는 나사 및 나사 쌍의 자전 동의를 통해 푸시로드로 모터의 자전 동의를 개조하는 선형 운동입니다. 자동 귀환 제어 장치 모터에, 돌격의 정밀도 통제 독특한, 폐쇄형 루프 제어을 이용하여 속도 및 위치는 편리하게 깨닫고, 프로그램은 현대 동작 관리 기술, 수 통제 기술 및 버스 (네트워크) 기술을 이용하여 깨달을 수 있습니다. 그것의 통제 및 편익 때문에, 그것은 깨달을 실린더와 액압 실린더 드라이브가 수 없는 정밀도 동작 관리를 깨달을 수 있습니다.
2. 특징:
시리즈 전기 실린더는 특징과 더불어 진보된 모듈 디자인을, 의 채택합니다:
★ 조밀한 구조 및 작은 차원
★ 고성능, 낮은 둔함, 저잡음, 높은 응답
★ 높은 신뢰성 및 긴 운영 생활
공 둘 다 나사와 롤러 나사의 ★ 신청 기술
★ 편리한 집합 및 사용의 에너지 절약, 간단한 정비
| 물자 |
★ 포탄: 알루미늄 합금을 위조하는 것은, 우아한 외관 반반하게 합니다. ★ 연장 막대: 높은 합금 강철, 저항하는 부식 -. |
| 정밀도 |
★는 고려사항으로 보통 반복성과 모터 정밀도를 둘 다 선택합니다. straightness를 위한 지도로 전기 실린더의 푸시로드를 가지고 가면 안됩니다. 고객은 가이드 기계장치를 소유하는 것을 디자인해야 합니다. 연결한 평행선인 ★ 모터는 때문에 그것 필요 동시 벨트 장치를 통해서 직접 연결하는과 비교된 정밀도를 줄일 것입니다. |
| 각측정속도 | ★는 높은 각측정속도에 있는 동의의 밑에 특별한 고려사항으로 일생을 선택합니다 (200mm/s 보다는 좀더). 선적 능력 및 정밀도는 둘 다 동시에 줄일 것입니다. |
| 치기 | ★는 모형 선정하는의 치기 우리가 한정된 스위치를 만나기 푸시로드 후에 감속하고기 멈추기를 위한 공간을 절약할기 필요가 있기 때문에 효과적인 치기 보다는 더 큰 20-50mm이어야 합니다. 빠른 속도, 더 큰 공간. |
| 돌격 | ★ 톱니바퀴 구동은 모터의 밑에 와 동시에 밀린 동시 벨트 구동기 보다는 더 많은 것을 가져올 것입니다. |
| 조작상 주기 시간 | 공 나사을 이용하여 자주 (50% 이상) 또는 지속적으로 달리는 ★. |
| 모터 선택 |
★ AC 자동 귀환 제어 장치 모터: 높은 정밀도, 높은 각측정속도, 중대한 돌격 및 평형은 족답합니다. ★ 족답 모터: 높은 정밀도, 느린 각측정속도 및 아주 중대한 돌격 (600kg 보다는 더 적은). ★ 정상적인 DC 모터는 속도를 통제하기 위하여 실행되고 그러나 있지 않을 수 있습니다. ★ 정상적인 비동시성 모터는 두어 통제된 속도이골. |
(선택) 특별한 생산:
★ 특수 설치, 보전, 방습 먼지 예방
★ High&low 온도 환경
바다, 반대로 폭발 일에 방수 ★
★ 선형 진지변환 감지기
★ 압력 감지기
★ 저항 그네 기계장치
★ 행성 변속기
★ 모터: AC 자동 귀환 제어 장치 모터, DC 무브러시 모터, 족답 모터, DC 모터, AC 빈도 변환 모터, 등.
3. 제품 모형 정의
![]()
![]()
![]()
보기: TJER160 S300 B R 05 A.M.C 10 05 0 P11 O/C N/P
|
TJER160 시리즈 아니.
TJER190 TJER220 TJER250 |
S300 효과적인 치기
TJER160: 50~1500mm TJER190: 50~2000mm TJER220: 50~2500mm TJER250: 50~3000mm |
B 나사 유형
B: 공 나사 C: 롤러 나사 |
|
R 반대로 교체
T: 없이 |
05 나사 지도 TJER190: 10,20mm TJER220: 10,20mm TJER250: 10,20mm |
모터 설치 유형 B: 평행선 |
|
M 실린더 설치 유형
M1: 두 배 옆 산 M2: 옆 turnnion 산 M3: 정면 플랜지 산 M4: 후방 플랜지 산 M5: 후방 U자형 갈고리 산 M6: 후방 갱구 산 MX: 주문을 받아서 만드는
|
C — 짐 접속 방식
C1: 남성 C2: 여성 C3: u-볼트 C4: 공 맨 위 경첩 CX: 주문을 받아서 만드는 |
10 힘
01:100W 02:200W 04:400W 08:750W 10:1000W 20:2000W 30:3000W |
|
05 감소 비율
05: 5에 1 10: 10에 1 20: 20에 1 |
한계 스위치의 2 수
(과태가 일반적으로 열리는 NPN 스위치입니다) |
O/C 한계 스위치
O: 일반적으로 열려있는 C: 정상적으로 마지막
|
|
유형을 N/P 느끼기
N: NPN P: PNP |
| 삐걱거리는 통치자 + 힘 감지기 |
|
힘 감지기: ① 4-20mA ② 0-10V 삐걱거리는 통치자: ① TTL 24V ② RS422 (5V 다름) |
|
부속의 결여되기 경우에, 그것은 비비기 통치자 또는 힘 감지기 없이 의미합니다. P01: 에서만 삐걱거리는 통치자 TTL (24V) P10: 삐걱거리는 통치자 4-20mA에서만 |
표:
1)효과적인 치기를 지키기 위하여, 예비된 5mm 공간인 2개의 끝 필요.
2)감지기는 모터의 동일한 측에 거치될 모터가 평행하 때 거치될 수 없었습니다.
4. 전기 실린더 선택 지도
(1) 모터 사이 관계는 전기 실린더의 토크 그리고 산출 힘을 출력했습니다:
F=T×η×2π×R/L
★ F: 전기 실린더 산출 힘, 단위: Kn
★ T: 모터 산출 토크, 단위: Nm
★ R: 감소 비율
★ L: 나사 지도, 단위: mm
★ η: 효율성 (일반적으로 총 효율성 85%입니다, 그러나 실제적인 효율성은 실제적인 사용 조건에 chage, 그것 근거를 둡니다)
(2) 전기 실린더 노동 생활
전기 실린더의 생활은 일반적으로 전기 실린더 나사의 내부 사용을 나타납니다. 그것은 2개 부품으로 분할될 수 있습니다:
1). 피로 생활, 그것을 산출 주어질 수 있습니다 조이십시오;
뒤에 오는 것 피로 생활의 계산 방법입니다.
L10= (Ca/Fm) 3×L
★ L10: 전기 실린더의 생활, 단위: Km
★ Fm: 전기 실린더, 단위의 평균 하중: Kn
★ 캘리포니아: 나사 견과 기본적인 동적인 짐, 단위: Kn
(나사 표본에 의해 검출될 수 있습니다)
★ L: 나사 지도, 단위: mm
2). 사용의 조건에 따라서 다른 생활, (온도와 같이 윤활의 유형을 사용하여 먼지는, 정기적으로 빈도, 등을 추가합니다). 생활의 이 종류는 경험에서 수시로 인출됩니다.
(3) 평균 하중의 계산
평균 하중 방법: 입방체 평균값은 힘, 속도, 일 주기 도중 다른 잡업 공간에 있는 시간에 따라 산출됩니다.
전기 실린더의 짐에 있는 변화
보이는 것과 같이 아래에:
![]()
전기 실린더의 평균 하중은 다음과 같이 산출됩니다:

5. 주변 부품표
| 이름 | 설명 |
| 1- 부속 거치 HNC/CRHNC 발 | 모터가 거치되는 parall 때, 이 부분은 방위와 흡진기 엔드 캡 설치를 위해 이용됩니다. |
| 2- 부속 거치 FNC/CRFNG 플랜지 | 모터가 거치되는 parall 때, 이 부분은 방위와 흡진기 엔드 캡 설치를 위해 이용됩니다. |
| 3- 부속 거치 ZNCF/CRZNG 포이 | 모터가 거치되는 parall 때, 이 부분은 방위와 흡진기 엔드 캡 설치를 위해 이용됩니다. |
| 4- LNZG/CRLNZG 포이 방위 | 실린더 구획에 거치되는 포이를 위해. |
| 5- SNC 두 배 U자형 갈고리 방위 | 모터를 위해 거치된 평행선. |
| 6- LSNG 둥근 경첩 U자형 갈고리 방위 | 모터를 위해 둥근 방위와 더불어 거치된 평행선. |
| 7- LSNSG 둥근 경첩 U자형 갈고리 방위 | 모터를 위해 거치된 평행선, 둥근 방위와 더불어, 용접 종합. |
| 8- 부속 거치 SNCS 두 배 U자형 갈고리 | 모터를 위해 둥근 방위와 더불어 거치된 평행선. |
| 9- LBG 두 배 U자형 갈고리 방위 | 모터를 위해 둥근 방위와 더불어 거치된 평행선. |
| 부속 거치 aJ 두 배 U자형 갈고리 | 모터를 위해 거치된 평행선. |
| aA- 부속 거치 두 배 U자형 갈고리 | 모터를 위해 둥근 방위와 더불어 거치된 평행선. |
| aB- 부속 거치 두 배 U자형 갈고리 | 모터를 위해 거치된 평행선. |
| aC- U자형 갈고리 방위 | 모터를 위해 거치된 평행선. |
| 광고 둥근 경첩 U자형 갈고리 방위 | 모터를 위해 둥근 방위와 더불어 거치된 평행선. |
| aE- 포이 방위 | 실린더의 어떤 위치에 거치를 위해. 모터가 거치한 평행선인 경우에, 설치 위치는 모터의 가까이에 할 수 있지 않았습니다. |
| 부속 거치 aF 발 | 축으로 거치되는 모터를 위해. |
| aG- 합동 방위 | 둥근 방위로. |
| 아아 연결 플랜지 | 광선 탈선 보상을 위해. |
| aI- 두 배 U자형 갈고리 | 비행기에 있는 실린더 그네를 위해. |
| bJ- 연결 부분적으로 각자 | 광선과 모난 탈선 보상을 위해. |
| 바륨 정각 둥근 경첩 U자형 갈고리 방위 | 합동 방위를 위해. |
| bB- 두 배 U자형 갈고리 | 실린더 그네 임명을 위해. |
| B.C. 인도 단위 | 실린더가 높은 토크의 밑에 뒤틀기 것을 막으십시오 |
| bD- 근접 스위치 | 위치 시험을 위해, 감지기 설치 구멍에서 통합될 수 있습니다. |
| 구멍 덮개는 있습니다 | 먼지가 들어가기 것을 막기를 위해. |
| bF- 평행선 임명 성분 | 모터를 위해 거치된 평행선. |
| bG- 축 임명 성분 | 축으로 거치되는 모터를 위해. |
6. 액압 실린더 & 압축 공기를 넣은 실린더와 비교하는
| 품목 | 전기 실린더 | 액압 실린더 | 압축 공기를 넣은 실린더 | |
|
원가 대조 |
가동 | 쉬운 | 복잡한 | 복잡한 |
|
환경 영향 |
환경 & 안전한 | 석유 누출 | 높은 소음 | |
| 안전 | 안전한 | 석유 누출 | 가스 누출 | |
| 에너지 손실 | 저손실 | 높은 손실 | 높은 손실 | |
| 일생 | 아주 오래 | 적당한 정비에 길 수 있습니다 | 적당한 정비에 길 수 있습니다 | |
| 비용 성과 | 높은 | 낮은 | 낮은 | |
| 정비 | 거의 유지 보수가 필요 없는 | 빈번하고 & 높은 비용 | 일정하고 & 높은 비용 | |
|
기능 비교 |
각측정속도 | 아주 높이 | 매체 | 높은 |
| 가속도 | 아주 높이 | 매체 | 높은 | |
| 단단함 | 아주 높이 | 낮은 | 낮은 | |
| 짐 능력 | 높은 | 높은 | 매체 | |
| 충격 저항 능력 |
높은 |
높은 |
매체 |
|
| 효율성 | >90% | <50% | <50% | |
| 위치 통제 | 쉬운 | 열심히 | 열심히 | |
| 위치 정밀도 | 아주 높이 | 매체 | 매체 |
7. 응용 범위:
★ 군 장비: 레이다, 미사일 창설자, 기갑 차량 그네 플랫폼, 특별한 장비 및 다른 군함 및 항공기 승강구, 오프닝, 좌석 높이 조정, 무기 학력별 반편성, 액추에이터, 실험적인 들기 지원, 탱크 포병 가는곳마다 방향 활동 조정, 로케트 연료의 강요, 로 문의 오프닝, 등.
★ 특별한 장비: 산업 자동화 생산 라인, 일관 작업, 근수 전송, 들기 플랫폼, 상쇄 통제, 벨브 통제, 동등한 조작자, 기계 장비 CT Kama 칼, 음식 및 약 기업, CNC 공구, 기업 포장 기계, 자동 전자 압박, 직물 장비 감기 기계 지수연동은, 통제 위치 죽어, 두기 교련 죄기.
★ 실험적인 장비: 가장 플랫폼, 시험대, 파 기계, 시험 장비 등.
이 유형은 자동 귀환 제어 장치에게 누르기의 모터 집합 생산 라인을 위해 특히 적당하 당신은 또한 우리의 자동 귀환 제어 장치 누르기 소프트웨어를 함께 구매할 수 있습니다.
![]()
![]()
![]()
8. 정비
★ 전기 실린더는 기름을 바르기 윤활제 GB7324-1994 일반적인 리튬 기초 3 기름을 바르기 윤활제로 때 잎 공장 급유합니다.
전기 실린더가 300 시간 동안 달린 후에 ★는, 기름을 바르기 윤활제를 다시 채웁니다. 2000hours 당 급유 빈도, 1 시간 평소처럼, 그것은 운영 환경 및 나날 조작상 시간의 기초에 결의가 굳습니다.
★ 급유 방법: 전기 실린더의 포탄에 충전물 구멍을 여십시오, 나사 견과에 충전물 구멍을 찾아내고 기름을 바르기 윤활제를 급유하기 위하여 나사를 도십시오.
기름을 바르기 윤활제를 위한 ★ 필요조건: GB7324-1994 일반적인 리튬 기초 3 기름을 바르기 윤활제.
추천된 제품